




Xavier: in silico deus ex machina


Xavier Hinaut joined the IMN on February 1st, 2016 as a junior researcher in the Mnemosyne team.
After obtaining his Ph.D. at the University of Lyon in January 2013 at the Stem Cell and Brain Research Institute (SBRI / INSERM 846) under the supervision of Peter Ford Dominey, Xavier did post-doctorate internships at the University of Hamburg in 2013 and 2015 (Marie Curie Individual Fellowship) in the team of Stefan Wermter, and and a post-doctorate internship (CNRS) in 2014 at the Paris-Saclay Neuroscience Institute (NeuroPSI) in the team of Catherine Del Negro and Jean-Marc Edeline.
The common thread of his research aims at <bold> the exploration of the neural coding and the modelling of complex sequences processing, chunking, learning and production, for “syntax-based” sequences, and to apply these models to robotics </bold> (for future embodiment purposes). In particular, his artificial neural networks based models are were focused on dynamics of prefrontal cortex and basal ganglia.
In these models, Xavier is interested in human (and robot) grammar learning and acquisition as well as the categorization of monkey motor action sequences. Besides, he worked on experimental protocols and on the analysis of neural codings of canary song. In order to better understand human language mechanisms, canary song is particularly interesting because it is very variable, it has a complex “syntax” and continues to evolve even during adult life.
It is without robot that Xavier practices dance, theater and windsurfing. He also tries climbing, kite surfing and more recently semi-triathlon.
Welcome to Xavier in the Institute of Neurodegenerative Diseases.
You may see examples of his work by clicking the links below:
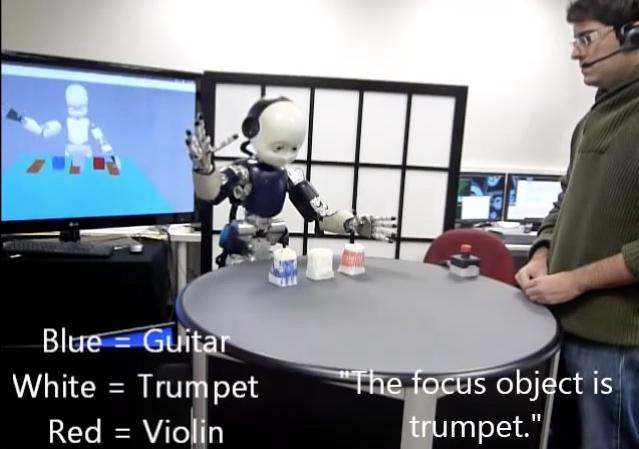
- The humanoid iCub robot understands the sentence: “Point the guitar before you put on the left the violin”; click here
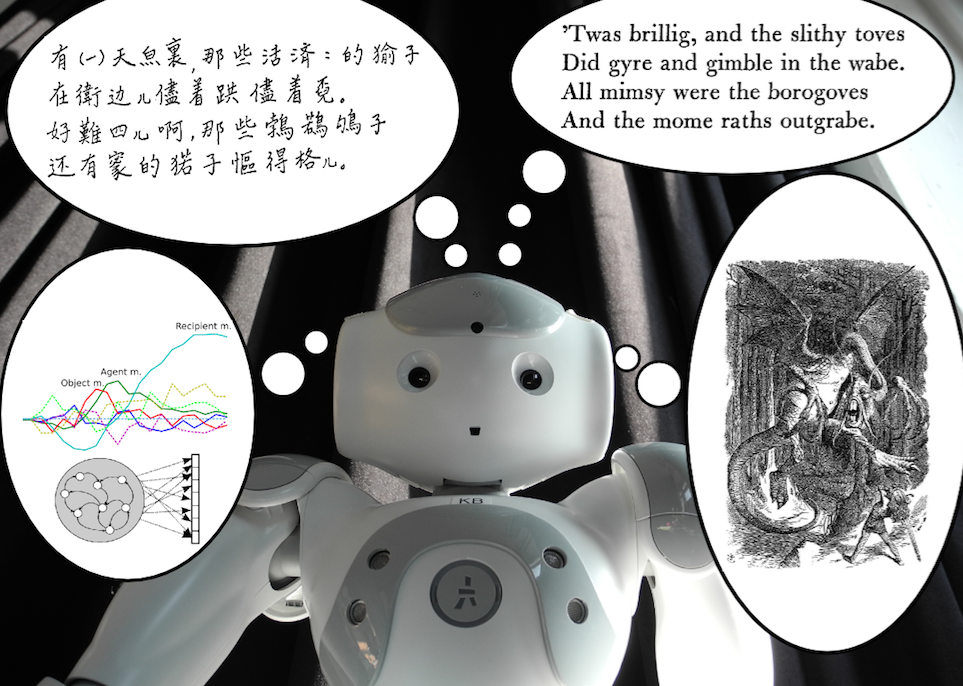
- iCub produces complex sentence structure with Reservoir Computing; click here
- Humanoidly Speaking – Learning about the world and language with a humanoid friendly robot; click here